MOTEC өз¶ҜёЧФЪБщЧФУЙ¶ИЖҪМЁЙПөДУҰУГ
өј¶Б
БщЧФУЙ¶ИФЛ¶ҜЖҪМЁКЗУГУЪ·ЙРРЖчЎўФЛ¶ҜЖчЈЁИз·Й»ъЎўіөБҫЈ©ДЈДвСөБ·өД¶ҜёРДЈДвЧ°ЦГЈ¬КЗТ»ЦЦІўБӘФЛ¶Ҝ»ъ№№Ј¬ЛьНЁ№эёДұд6ёцҝЙТФЙмЛхөДөз¶ҜёЧАҙКөПЦЖҪМЁөДҝХјдБщЧФУЙ¶ИФЛ¶ҜЈЁҙ№ЦұПтЎўәбПтЎўЧЭПтЎўё©СцЎў№цЧӘЎўТЎ°ЪЈ©Ј¬јҙXЎўYЎўZ·ҪПтөДЖҪТЖәНИЖXЎўYЎўZЦбөДРэЧӘФЛ¶ҜЈ¬ТФј°ХвР©ЧФУЙ¶ИөДёҙәПФЛ¶ҜЎЈ
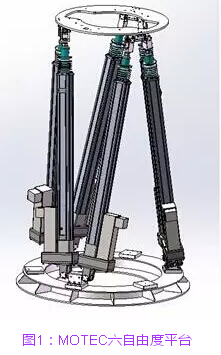
MOTECөз¶ҜёЧБщЧФУЙ¶ИФЛ¶ҜЖҪМЁКЗРВјјКхөДУҰУГЈ¬ЖҪМЁҫЯУРЗеҪаЎўХыҪаөИУЕөгЈ¬МШұрКЗФЛ¶Ҝҫ«¶И·ҪГжЈ¬ёьКЗТәС№ФЛ¶ҜЖҪМЁОЮ·ЁұИДвөДЈ¬№КёГЖҪМЁ№г·әУҰУГУЪОдЖчСР·ўЎўКэҝШ»ъҙІЎўТҪБЖКЦКхЎўәҪМм¶ФҪУөИБмУтЎЈ
БщЧФУЙ¶ИЖҪМЁҫЯУРТФПВМШөгЈә
(1) БщЧФУЙ¶ИЖҪМЁУЙ6ёцёЧН¬КұЦ§іЕЈ¬Улҙ®БӘ»ъ№№өДРьұЫБәПаұИЈ¬ёХ¶ИҙуЈ¬Ҫб№№ОИ¶ЁЈ¬ФЪПаН¬өДЧФЦШ»тМе»эПВУРұИҙ®БӘ»ъ№№ёЯөДіРФШДЬБҰЈ»
(2) ҙ®БӘ»ъ№№Д©¶ЛјюЙПөДОуІоКЗёчёц№ШҪЪОуІоөД»эАЫәН·ЕҙуЈ¬Тт¶шЖдҫ«¶ИөНЈ¬ОуІоҙ󣬶шІЙУГІўБӘ»ъ№№өДБщЧФУЙ¶ИЖҪМЁГ»УРОуІо»эАЫәН·ЕҙуЈ¬ТтҙЛОуІоРЎЎўҫ«¶ИёЯЈ»
(3) БщЧФУЙ¶ИЖҪМЁІЙУГ¶ФіЖКҪҪб№№Ј¬ёчПтН¬РФәГЈ»
(4) ФЪО»ЦГЗуҪв·ҪГжЈ¬ҙ®БӘ»ъ№№ЗуХэҪвИЭТЧЈ¬ө«Зу·ҙҪвК®·ЦА§ДСЈ¬¶шІЙУГІўБӘ»ъ№№өДБщЧФУЙ¶ИЖҪМЁЗуХэҪвА§ДСЈ¬Зу·ҙҪвИҙ·ЗіЈИЭТЧЎЈФЪПЯКөКұјЖЛгКұКЗТӘЗу·ҙҪвЈ¬ПаұИЦ®ПВЈ¬ІўБӘ»ъ№№ИЭТЧКөПЦЎЈ
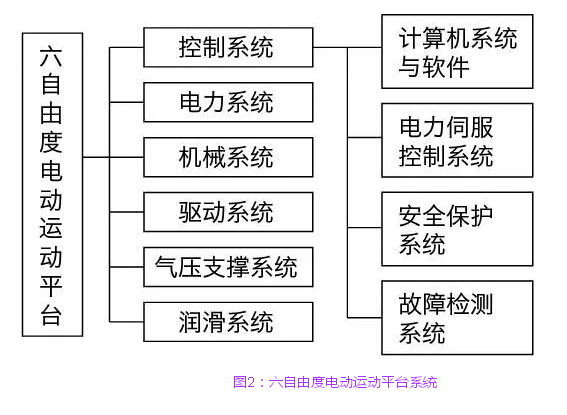 Іҝ·ЦЦчТӘ°ьАЁУГ»§ҪзГжіМРтЎўЛЕ·юЛг·ЁіМРтЎўPIDІОКэЙиЦГіМРтөИЎЈ Іҝ·ЦЦчТӘ°ьАЁУГ»§ҪзГжіМРтЎўЛЕ·юЛг·ЁіМРтЎўPIDІОКэЙиЦГіМРтөИЎЈ
өзҝШІҝ·ЦөДЧчУГКЗҪУКХҝШЦЖПөНіКдіцөДЦёБоКэҫЭЈ¬ІўҪ«Ждҙ«КдёшЛЕ·юЗэ¶ҜЖчЈ¬Зэ¶ҜЖчҪ«РЕәЕ·ЕҙуәуҝШЦЖөз»ъФЛ¶ҜЈ¬Ҫш¶шҙш¶Ҝөз¶ҜёЧФЛ¶ҜЈ¬ІўЧоЦХК№МЁМеКөПЦёчЦЦЧЛМ¬ЎЈ°ьАЁ№ӨҝШ»ъЎўФЛ¶ҜҝШЦЖҝЁЎўЛЕ·юЗэ¶ҜЖчЎўЛЕ·юөз»ъЎўөзЧиіЯј°Па№ШөзЖчФӘјюөИЎЈ
»ъРөІҝ·ЦУГУЪЦ§іЕёәФШЈ¬°ьАЁЙПЖҪМЁЎўЙПБ¬ҪУҪВЎўПВБ¬ҪУҪВЎўөз¶ҜёЧЎўЦ§іЕјЬЎўөЧЧщөИЎЈЖҪМЁУЙөз¶ҜёЧЗэ¶ҜЈ¬ҪшРРәб№цЎўЖ«әҪЎўё©СцИэёцЧЛМ¬әНXЎўYЎўZЖҪТЖ№І6ёцЧФУЙ¶ИөДФЛ¶ҜЎЈ
өз¶ҜёЧҫЯУРҙ«¶ҜР§ВКёЯЎўУҰУГ·¶О§№гЎў¶ЁО»ҫ«¶ИёЯЎўҫІТфФЛРРЎўҪб№№јтөҘЎўО¬»Ө·ҪұгЎўҝЙҝҝРФәН°ІИ«РФёЯЎўФЛРРЖҪОИЎўК№УГКЩГьіӨөИУЕөгЎЈ
 ёҪЈәБщЧФУЙ¶ИЖҪМЁөД·ўХ№ ёҪЈәБщЧФУЙ¶ИЖҪМЁөД·ўХ№
1965ДкЈ¬Уў№ъ№ӨіМКҰStewarМбіцБщЦбІўБӘКҪҝХјд»ъ№№Ј»
70ДкҙъіхЈ¬ГА№ъіцПЦБщЧФУЙ¶ИІўБӘ»ъ№№ФЛ¶ҜЖҪМЁөД·ЙРРДЈДвЖчІўЦЖ¶ЁПөНіұкЧјЎЈЧФҙЛЈ¬БщЧФУЙ¶ИФЛ¶ҜЖҪМЁЗчПтұкЧј»ҜЎўПөБР»ҜЙъІъҪЧ¶ОЈ»
1978ДкЈ¬°ДҙуАыСЗ»ъ№№С§ЧЁјТHunt.KHМбіцЖҪМЁ»ъ№№УГЧчІўБӘ»ъЖчИЛөДЦчТӘ»ъ№№Ј»
Mac.Callion әНPhamФЪ1979ДкКЧҙОАыУГБщЧФУЙ¶ИЖҪМЁ»ъ№№ЙијЖіцЧ°Ед»ъЖчИЛЈ¬АӯҝӘБЛІўБӘ»ъЖчИЛСРҫҝөДРтД»Ј»
ҪшИл80ДкҙъТФәуЈ¬БщЧФУЙ¶ИФЛ¶ҜЖҪМЁФҪАҙФҪ№г·әөДУҰУГУЪ»ъЖчИЛЎўІўБӘ»ъҙІЎўҝХјд¶ФҪУјјКхЎўәҪҝХәҪәЈЙиұёЎўТЎ°ЪДЈДвТФј°УйАЦЙиК©ЙПЎЈ
|
